U modelov ponoriek
sa používa statický a dynamický systém ponárania.
Základným predpokladom dynamického systému je to, že ponorka je v každom
momente, t.j. aj keď je pod vodou, ľahšia ako voda. Systém spočíva v pôsobení
vztlakových síl vody na ponorné krídla ponorky, podobne ako to je u vztlakových
síl vzduchu pri lietadle. V obidvoch prípadoch vztlakové sily vznikajú
iba pri vzájomnom protipohybe média (vody resp. vzduchu) a krídla na ktoré
pôsobí. Z toho vyplýva, že ponorka sa môže ponoriť, podobne ako lietadlo
vzlietnuť, iba ak sa pohybuje určitou rýchlosťou. Ponáranie takéhoto modelu
je možné len ak je v pohybe a toto ponáranie nie je realistické. Ani u
skutočných ponoriek sa tento systém nepoužíva. Ale nespornou a veľmi významnou
výhodou tohto systému je, že v prípade poruchy modelu (porucha RC sústavy,
motorčekov atď.) t.j. straty pohybu vztlaková sila zanikne a model sa
automaticky vynorí. Model ponorky, v ktorej je použitý tento systém vidíte
na obr.1.
 |
obr. 1 |
Základným predpokladom
statického systému je to, že ponorka keď chceme aby sa ponorila, musí
byť ťažšia ako voda, presne tak ako u skutočných ponoriek. Z toho vyplýva,
že pri tomto systéme sa môže ponoriť aj v kľude bez toho aby sa pohybovala.
Tento stav sa ako u modelu tak aj u skutočnej ponorky dosiahne tým, že
do seba načerpá vodu. Tým sa stane ťažšou ako voda a ponorí sa. Keď sa
chce vynoriť túto vodu zo seba vyčerpá. Podľa toho akým spôsobom model
ponorky do seba načerpá vodu, poznáme nasledujúce možnosti realizácie
tohoto systému ponárania :
- odvzdušňovaná záťažová nádrž
- flexibilná záťažová nádrž
- tlaková záťažová nádrž
- piestová záťažová nádrž
- membránová záťažová nádrž (v podstate modifikácia piestovej záťažovej
nádrže)
- vlnovcová záťažová nádrž (v podstate modifikácia piestovej záťažovej
nádrže)
- plynom ovládaná záťažová nádrž
- kompresorová záťažová nádrž (vylepšená a doplnená plynom ovládaná záť.nádrž)
- kombinovaný záťažový systém
Podľa mojich osobných skúseností, ktoré som získal účasťou na stretnutí
ponorkových modelárov spojené s výstavou a funkčným predvádzaním modelov
(reportáž v RC revue 4/2002) a viacerých návštev na veľkých modelárskych
výstavách (reportáž RC revue 1/2003), som získal názor, že najrozšírenejšou
realizáciu stat. sys. ponárania je piestová záťažová nádrž. Je tomu možno
aj preto tak, lebo najvyužívanejšia firma vyrábajúca komponenty a stavebnice
modelov ponoriek ponúka iba túto realizáciu stat.sys.ponárania.
Piestové záťažové nádrže ktoré je možno vidieť na obrázkoch sú od nemeckej
firmi Alexander Engel KG, www.ubootmodelle.de. Piestová záťažová nádrž
je v podstate obrovská injekčná striekačka. Plášť je zhotovený z trubky
z PVC (vodoinštalatérske trubky), hliníka alebo mosadze. Piest môže byť
zhotovený z textitu alebo sklotextitu, v ktorom sú vysústružené aspoň
dve drážky do ktorých sa umiestnia gumové O-krúžky (tesnenia s prierezom
v tvare O), medzi ktoré je vhodné dať vazelínu. Tá zmenší trenie medzi
O-krúžkami a vnútornou stranou plášťu, čím uľahčí pohyb piestu a zároveň
zvýši odolnosť voči prenikaniu vody. Piest je posúvaný skrutkovým hriadeľom
(závitová tyč), ktorý je poháňaný prevodovkou s motorom. Ak piestová záťažová
nádrž do seba naberá vodu, t.j. piest sa vyťahuje smerom von z trubky,
stláča vzduch vo vnútri ponorky, čím sa tlak vzduchu zvyšuje. Toto zvýšenie
tlaku má za následok pozitívnu skutočnosť, ktorou je zväčšenie odolnosti
voči vnikaniu vody do modelu, či už cez tesnenie hlavného otvoru, tiahla
alebo hriadeľky. Ak sa poloha piestu meria napríklad lineárnym potenciometrom
napojeným na závit, možno vznášavosť ponorky pri ponáraní a hĺbkovom ovládaní
nastaviť veľmi presne. Z dôvodu veľkého zdvihu piestu sa tento typ záťažových
nádrží osadzuje zväčša vodorovne. Znamená to, že počas napĺňania nádrže
vodou je ovplyvňované osové ťažisko ponorky. Ak je napríklad vyvážená
tak, aby sa pohybovala vodorovne s plnou záťažovou nádržou, pri prázdnej
nádrži už uhol (sklon) naďalej nie je nulový. Túto nevýhodu možno prekonať
použitím dvoch piestových nádrží umiestnených v prednej a zadnej časti
ponorky. A táto nevýhoda sa razom stáva výhodou, lebo nezávislo ovládané
predná a zadná nádrž ponúkajú tiež nastavenie pozdĺžneho sklonu pre vodorovnosť
na povrchu a pekné úrovňové ponáranie. Vzhľadom na to, že voda je v nádrži
"na pevno" ľahšie sa docieli úrovňová periskopová hĺbka, nakoľko
žiadna vodná záťaž sa nemôže "pohupovať" v záťažových nádržiach
a tým narušiť ťažisko (stred) vznášania.
 |
obr.2 |
Na obrázku č.2 vidíte
profesionálne riešenie piestových záťažových nádrží. Fotka je z výstavy,
kde boli dve piestové nádrže pre názornosť umiestnené vedľa seba. V skutočnom
modeli vzhľadom aj na obmedzený priestor to nie je možné. Tam sa umiestňujú
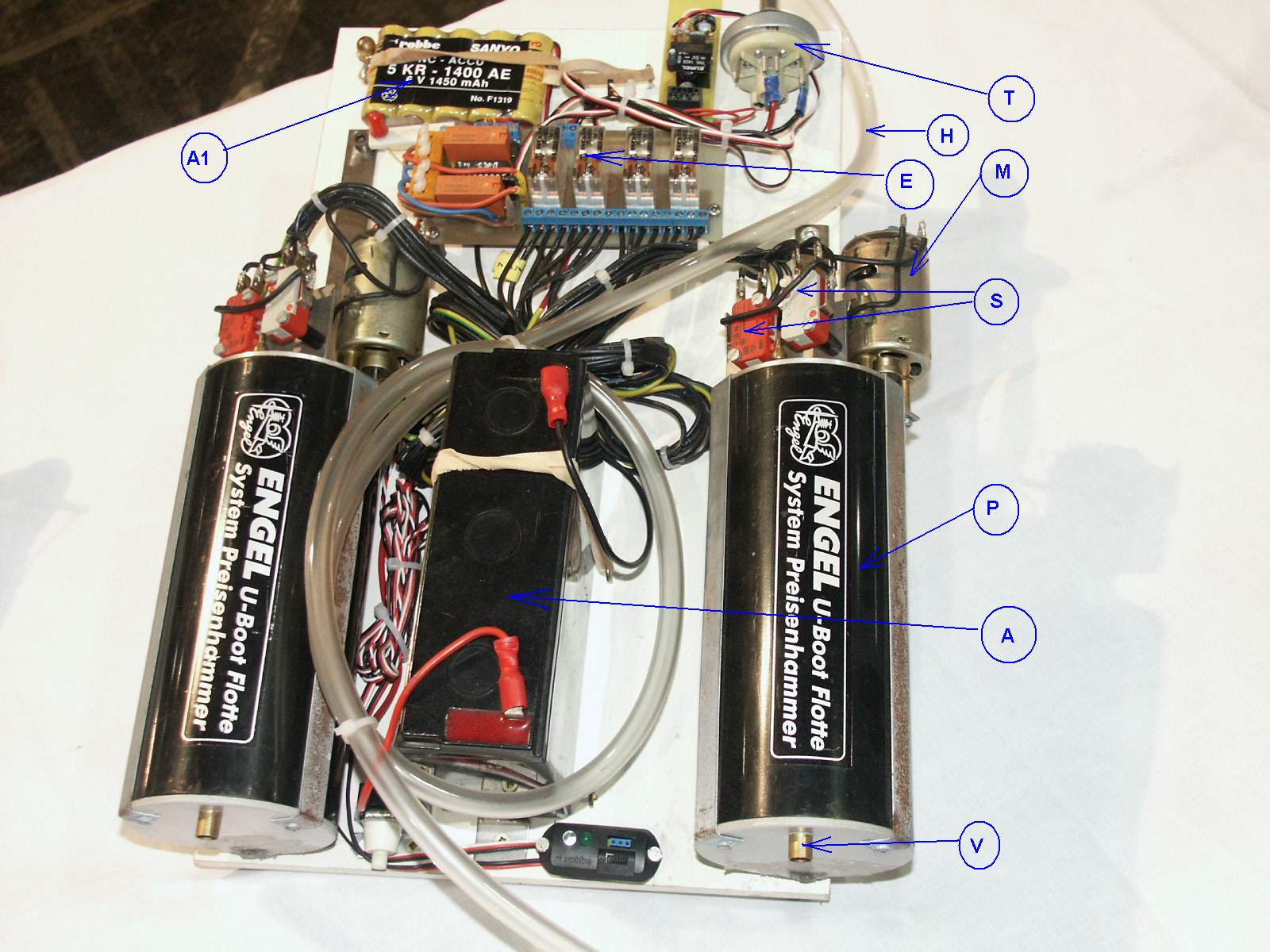
za sebou, ako to môžete vidieť na obr.č.3. Obidve nádrže sú rovnaké a
preto na obrázku sú odkazy iba na jednu. P-samotná piestová nádrž. M-motorček,
ktorý cez prevody poháňa skrutkovú hriadeľ na konci ktorej je upevnený
piest. S-dva mikrospínače, ktoré prerušujú prívod prúdu k motorčeku M,
ak je piest či už úplne zasunutý alebo vysunutý (strážia krajné polohy
piestu). V-vyústenie (výtokový otvor) na ktoré sa upevní hadica, ktorou
sa dostáva voda do/z nádrže. A-akumulátor služaci na napájanie motorčekov
piestových nádrží. Popis činnosti piestového záťažového systému, ktorý
bol uvedený vyššie je principiálny, ale pri profesionálnom riešení je
činnosť oveľa zložitejšia. A o riadenie tejto činnosti sa stará riadiaca
elektronika-E. A1-akumulátor, ktorý napája riadiacu elektroniku. Dôležitou
súčasťou je T-tlakový spínač, ktorý je prostredníctvom hadice-H spojený
s vodou okolo ponorky. Ak sa ponorka ponorí moc hlboko, zväčšený tlak
vody zapôsobí na tlakový spínač, ktorý prostredníctvom riadiacej elektroniky-E
dá povel na vyprázdnenie piestových nádrží a tým na vynorenie. Tým sa
zabezpečí, aby nadmerný nárast tlaku vo vodotesnom oddelení nevyrazil
tesnenie.
S predchádzajúcimi riadkami úzko súvisí aj ďalší problém vodotesnosti
ponorky. Keď uzavriete trup a ponoríte model do vody teplota vo vnútri
poklesne s tým dôsledkom, že vzduch vo vnútri sa zmrští (zmenší svoj objem).
Táto podtlaková situácia bude nasávať vodu zo všadiaľ kde je to možné,
napr. tiahla, hriadeľky. Pre odstránenie tohto problému existuje pomerne
jednoduché ale značne účinné a odskúšane riešenie, na ktoré je potrebná
injekčná striekačka, bicyklový ventil a bicyklová pumpa. Injekciu hadičkou
spojíme s mosadznou trubkou, ktorá je vlepená do paluby. Na inom mieste
vlepíme do paluby ventil. Na overenie vodotesnosti ponorky, pri zatlačenom
pieste injekcie, napumpujte pumpou vzduch cez ventil do vnútra trupu až
kým sa piest injekcie pohne. Ak sa piest nepohybuje, potom ponorka netesní
a naopak, ak sa pohybuje, tak je ponorky vodotesná. Ako vedľajší prínos
máme teraz vo vodotesnej ponorke slabý pretlak, ktorý napomáha eliminovať
problémy spomenuté vyššie.
 |
obr.3 |
Na obrázku č.3 vidíte praktické rozmiestnenie jednotlivých súčastí vo vnútri trupu. P1 je predná a P2 zadná piestová nádrž. K je kryt hlavného otvoru, ktorý je v tomto prípade zhotovený z plexiskla ale môže byť aj z plechu cca 3-4 mm hrubého. T je tesnenie medzi trupom a krytom, ktoré môže byť z gumy, neoprénu ale videl som už aj toto tesnenie realizované zo silikónového tmelu. S sú skrutky, ktorými sa pripevňuje kryt k trupu a sú vlepené z vnútra trupu.
 |
obr.4 |
Na obrázku č.4 je
pohľad na predný otvor, ktorý je zakrytý plexisklom. N je nadstavba, ktorá
sa pripevní na samotný trup pomocou skrutky S. Túto nadstavbu je vidieť
aj na obr. č.3. Predná piestová nádrž P1 je napojená na hadicu H, prostredníctvom
ktorej sa voda dostáva do/z nádrže. T je tiahlo od predného ponorného
krídla (hĺbkového kormidla), ktorého vodotesnosť pri prechode trupom je
zabezpečená použitím vlnovca V.
Dúfam, že vám tento článok pomohol urobiť si lepší obraz o jednej z najrozšírenejších
realizácií statického systému ponárania. Sám staviam model ruskej atómovej
balistickej ponorky TYPHOON,
v ktorej chcem použiť spomínaný systém. Takže začas budem dúfam písať
o svojich vlastných skúsenostiach.
S pozdravom František
Valček